
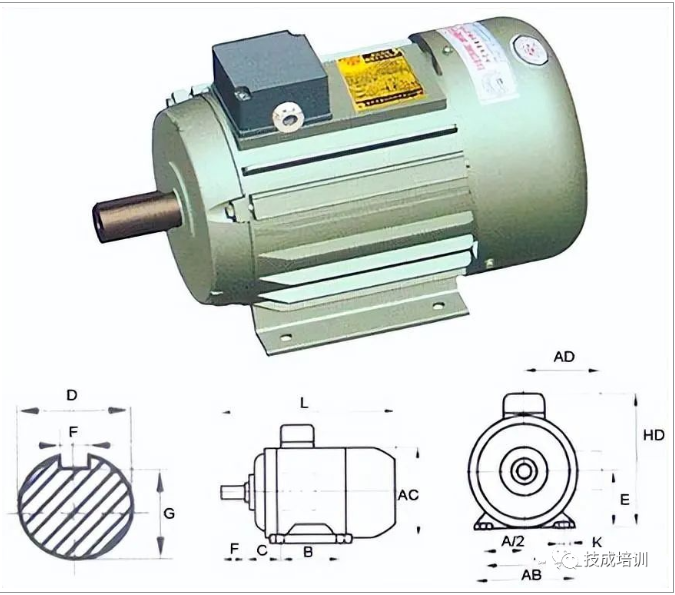
एक त्रि-चरण अतुल्यकालिकमोटरयह एक प्रकार की प्रेरण मोटर है जिसे 380V त्रि-चरण एसी धारा (120 डिग्री का चरण अंतर) को एक साथ जोड़कर संचालित किया जाता है। त्रि-चरण अतुल्यकालिक मोटर के रोटर और स्टेटर के घूर्णनशील चुंबकीय क्षेत्र के कारण, जो एक ही दिशा में और अलग-अलग गति से घूमते हैं, एक स्लिप दर होती है, इसलिए इसे त्रि-चरण अतुल्यकालिक मोटर कहा जाता है।
एक त्रिचरणीय अतुल्यकालिक मोटर के रोटर की गति घूर्णनशील चुंबकीय क्षेत्र की गति से कम होती है। रोटर वाइंडिंग चुंबकीय क्षेत्र के सापेक्ष गति के कारण विद्युतगतिशील बल और धारा उत्पन्न करती है, और चुंबकीय क्षेत्र के साथ परस्पर क्रिया करके विद्युत चुम्बकीय टॉर्क उत्पन्न करती है, जिससे ऊर्जा रूपांतरण होता है।
एकल-चरण अतुल्यकालिक की तुलना मेंमोटर्सतीन-चरण अतुल्यकालिकमोटर्सइनका परिचालन प्रदर्शन बेहतर होता है और इनसे विभिन्न सामग्रियों की बचत हो सकती है।
रोटर की विभिन्न संरचनाओं के आधार पर, तीन-चरण वाले अतुल्यकालिक मोटरों को केज प्रकार और वाउंड प्रकार में विभाजित किया जा सकता है।
केज रोटर वाली अतुल्यकालिक मोटर की संरचना सरल होती है, संचालन विश्वसनीय होता है, यह हल्की होती है और इसकी कीमत कम होती है, इसलिए इसका व्यापक रूप से उपयोग किया जाता है। इसकी मुख्य कमी गति नियंत्रण में कठिनाई है।
एक वाउंड थ्री-फेज़ असिंक्रोनस मोटर के रोटर और स्टेटर में भी थ्री-फेज़ वाइंडिंग होती हैं और ये स्लिप रिंग और ब्रश के माध्यम से एक बाहरी रियोस्टैट से जुड़े होते हैं। रियोस्टैट के प्रतिरोध को समायोजित करके मोटर के स्टार्ट होने की क्षमता को बेहतर बनाया जा सकता है और मोटर की गति को नियंत्रित किया जा सकता है।
तीन-चरण अतुल्यकालिक मोटर का कार्य सिद्धांत
जब सममित त्रि-चरण प्रत्यावर्ती धारा को त्रि-चरण स्टेटर वाइंडिंग पर लगाया जाता है, तो एक घूर्णनशील चुंबकीय क्षेत्र उत्पन्न होता है जो स्टेटर और रोटर के आंतरिक वृत्ताकार स्थान के साथ समकालिक गति n1 पर दक्षिणावर्त घूमता है।
चूंकि घूर्णनशील चुंबकीय क्षेत्र n1 गति से घूमता है, इसलिए रोटर चालक प्रारंभ में स्थिर रहता है, अतः रोटर चालक स्टेटर के घूर्णनशील चुंबकीय क्षेत्र को काटकर प्रेरित विद्युतगतिशील बल उत्पन्न करेगा (प्रेरित विद्युतगतिशील बल की दिशा दाहिने हाथ के नियम द्वारा निर्धारित की जाती है)।
रोटर चालक के दोनों सिरों पर शॉर्ट-सर्किट रिंग द्वारा शॉर्ट-सर्किट होने के कारण, प्रेरित विद्युत-प्रेरक बल के प्रभाव से, रोटर चालक में एक प्रेरित धारा उत्पन्न होती है जो मूलतः प्रेरित विद्युत-प्रेरक बल की दिशा में ही होती है। रोटर का धारावाहक चालक स्टेटर के चुंबकीय क्षेत्र में विद्युत चुम्बकीय बल के अधीन होता है (बल की दिशा का निर्धारण बाएँ हाथ के नियम द्वारा किया जाता है)। विद्युत चुम्बकीय बल रोटर शाफ्ट पर विद्युत चुम्बकीय टॉर्क उत्पन्न करता है, जिससे रोटर घूर्णनशील चुंबकीय क्षेत्र की दिशा में घूमने लगता है।
उपरोक्त विश्लेषण से यह निष्कर्ष निकाला जा सकता है कि विद्युत मोटर का कार्य सिद्धांत इस प्रकार है: जब मोटर की तीन-फेज स्टेटर वाइंडिंग (प्रत्येक में 120 डिग्री का विद्युत कोण अंतर होता है) में तीन-फेज सममित प्रत्यावर्ती धारा प्रवाहित की जाती है, तो एक घूर्णनशील चुंबकीय क्षेत्र उत्पन्न होता है, जो रोटर वाइंडिंग को काटता है और उसमें प्रेरित धारा उत्पन्न करता है (रोटर वाइंडिंग एक बंद परिपथ है)। स्टेटर के घूर्णनशील चुंबकीय क्षेत्र की क्रिया के तहत धारा प्रवाहित करने वाला रोटर चालक विद्युत चुम्बकीय बल उत्पन्न करता है। इस प्रकार, मोटर शाफ्ट पर विद्युत चुम्बकीय टॉर्क उत्पन्न होता है, जो मोटर को घूर्णनशील चुंबकीय क्षेत्र की दिशा में घुमाता है।
तीन-चरण अतुल्यकालिक मोटर का वायरिंग आरेख
तीन-चरण वाले अतुल्यकालिक मोटरों की बुनियादी वायरिंग:
एक त्रि-चरण अतुल्यकालिक मोटर की वाइंडिंग से निकलने वाले छह तारों को दो बुनियादी कनेक्शन विधियों में विभाजित किया जा सकता है: डेल्टा डेल्टा कनेक्शन और स्टार कनेक्शन।
छह तार = तीन मोटर वाइंडिंग = तीन हेड एंड + तीन टेल एंड, एक मल्टीमीटर का उपयोग करके एक ही वाइंडिंग के हेड और टेल एंड के बीच कनेक्शन को मापा जाता है, यानी U1-U2, V1-V2, W1-W2।
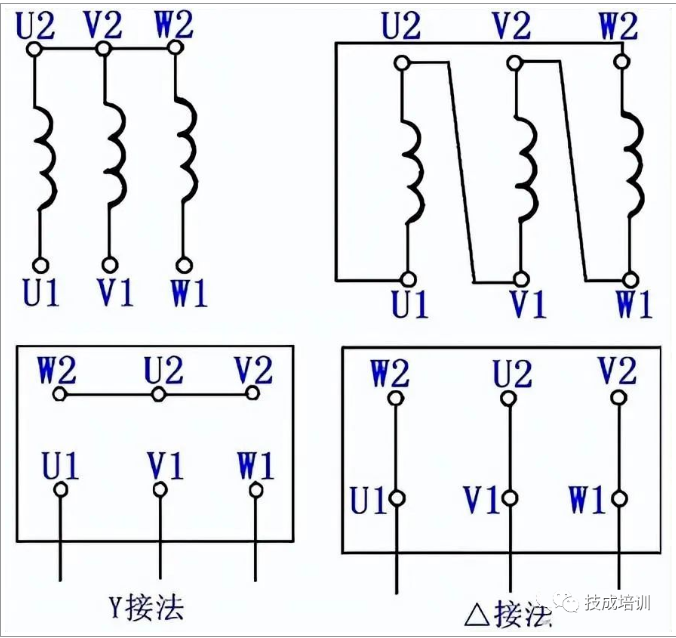
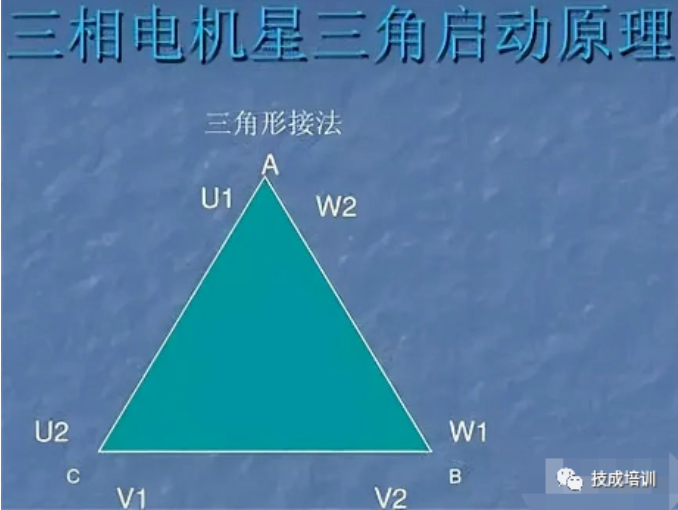
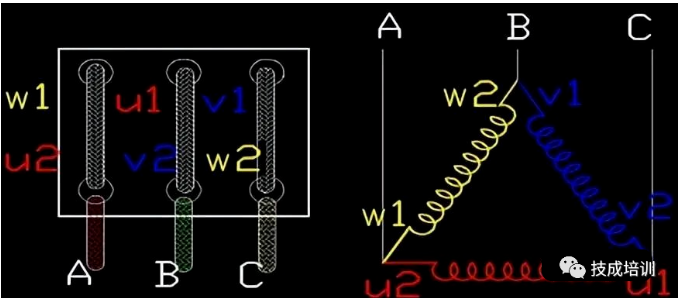
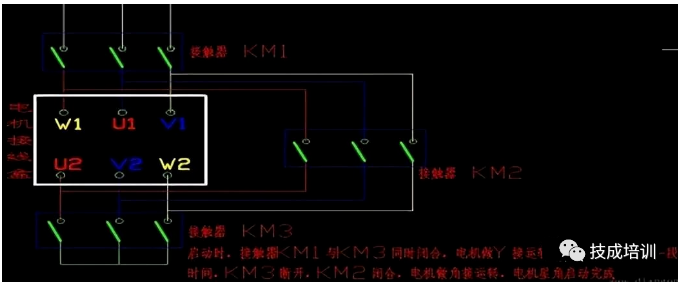
1. त्रिचरण अतुल्यकालिक मोटरों के लिए त्रिभुजाकार डेल्टा कनेक्शन विधि
त्रिभुजाकार डेल्टा कनेक्शन विधि में, तीन घुमावों के सिरों और पूंछों को क्रमानुसार जोड़कर एक त्रिभुज बनाया जाता है, जैसा कि चित्र में दिखाया गया है:
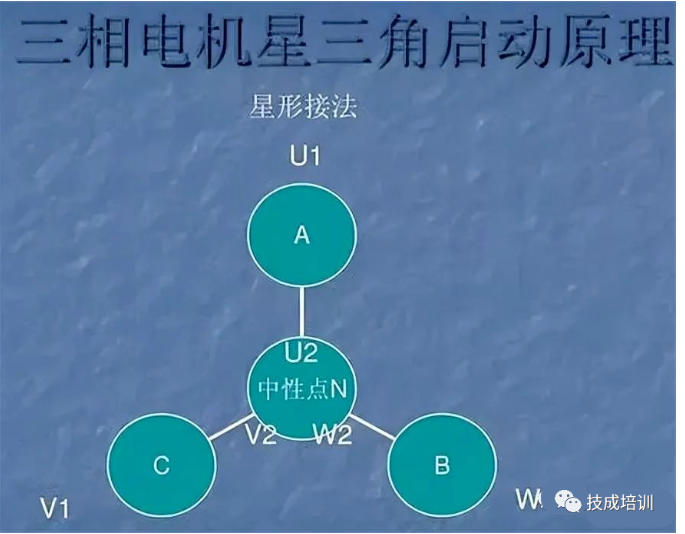
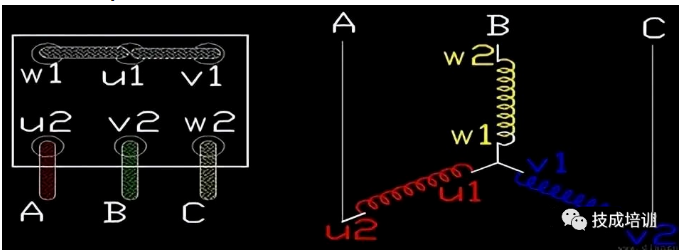
2. त्रिचरण अतुल्यकालिक मोटरों के लिए स्टार कनेक्शन विधि
स्टार कनेक्शन विधि में तीन वाइंडिंग के अंतिम या अंतिम सिरों को जोड़ा जाता है, और बाकी तीन तारों का उपयोग पावर कनेक्शन के रूप में किया जाता है। कनेक्शन विधि चित्र में दर्शाई गई है:
तीन चरण वाले अतुल्यकालिक मोटर के वायरिंग आरेख की व्याख्या चित्रों और पाठ सहित।
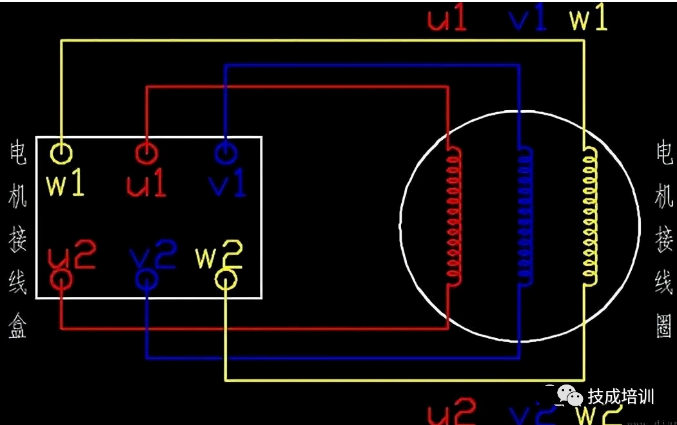
तीन चरण मोटर जंक्शन बॉक्स
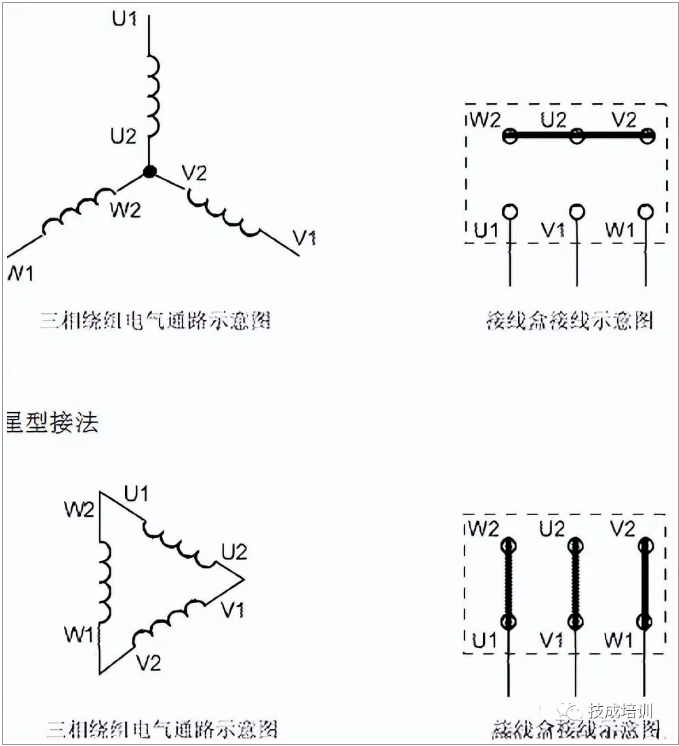
जब त्रि-चरण अतुल्यकालिक मोटर को जोड़ा जाता है, तो जंक्शन बॉक्स में कनेक्टिंग पीस को जोड़ने की विधि इस प्रकार है:
जब तीन-चरण अतुल्यकालिक मोटर को कोने में जोड़ा जाता है, तो जंक्शन बॉक्स कनेक्शन पीस को जोड़ने की विधि इस प्रकार है:
तीन-चरण वाले अतुल्यकालिक मोटरों के लिए दो कनेक्शन विधियाँ हैं: स्टार कनेक्शन और त्रिभुज कनेक्शन।
त्रिभुज विधि
समान वोल्टेज और तार व्यास वाली कुंडलियों को लपेटने में, तारा कनेक्शन विधि में त्रिभुज कनेक्शन विधि की तुलना में प्रति फेज़ तीन गुना कम घुमाव (1.732 गुना) और तीन गुना कम बिजली खपत होती है। तैयार मोटर की कनेक्शन विधि 380V के वोल्टेज को सहन करने के लिए निर्धारित की गई है और आमतौर पर इसमें संशोधन करना उपयुक्त नहीं है।
तीन-फेज वोल्टेज का स्तर सामान्य 380V से भिन्न होने पर ही कनेक्शन विधि को बदला जा सकता है। उदाहरण के लिए, जब तीन-फेज वोल्टेज का स्तर 220V हो, तो मूल 380V वोल्टेज वाले तीन-फेज कनेक्शन को त्रिभुजाकार कनेक्शन विधि में बदला जा सकता है; जब तीन-फेज वोल्टेज का स्तर 660V हो, तो मूल 380V वोल्टेज वाले तीन-फेज डेल्टा कनेक्शन को स्टार कनेक्शन विधि में बदला जा सकता है, और इसकी शक्ति अपरिवर्तित रहती है। सामान्यतः, कम शक्ति वाले मोटरों को स्टार कनेक्शन विधि से जोड़ा जाता है, जबकि उच्च शक्ति वाले मोटरों को डेल्टा कनेक्शन विधि से जोड़ा जाता है।
निर्धारित वोल्टेज पर, डेल्टा कनेक्शन वाली मोटर का उपयोग किया जाना चाहिए। यदि इसे स्टार कनेक्शन वाली मोटर में बदला जाता है, तो यह कम वोल्टेज पर चलने वाली मोटर बन जाती है, जिसके परिणामस्वरूप मोटर की शक्ति और स्टार्टिंग करंट में कमी आती है। उच्च शक्ति वाली मोटर (डेल्टा कनेक्शन विधि) को स्टार्ट करते समय, करंट बहुत अधिक होता है। लाइन पर स्टार्टिंग करंट के प्रभाव को कम करने के लिए, आमतौर पर स्टेप-डाउन स्टार्टिंग विधि अपनाई जाती है। एक विधि यह है कि स्टार्टिंग के लिए मूल डेल्टा कनेक्शन विधि को स्टार कनेक्शन विधि में बदल दिया जाए। स्टार कनेक्शन विधि से स्टार्ट करने के बाद, इसे वापस डेल्टा कनेक्शन विधि में बदल दिया जाता है।
तीन-चरण अतुल्यकालिक मोटर का वायरिंग आरेख
तीन-चरण वाले अतुल्यकालिक मोटरों के लिए आगे और पीछे की स्थानांतरण लाइनों का भौतिक आरेख:
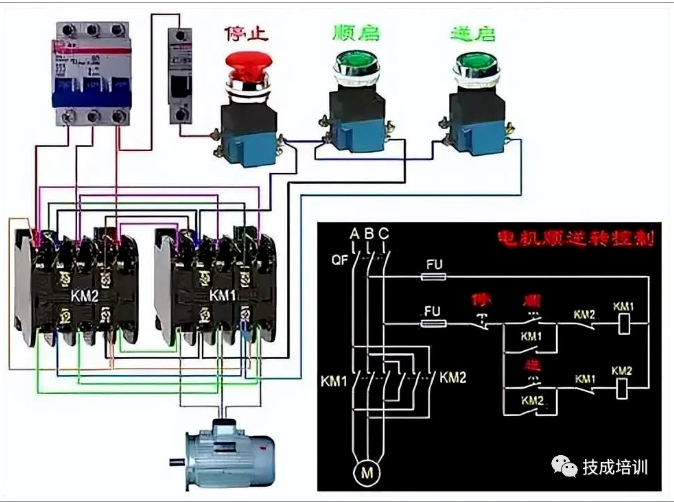
मोटर को आगे और पीछे नियंत्रित करने के लिए, इसकी विद्युत आपूर्ति के किन्हीं दो चरणों को एक दूसरे के सापेक्ष समायोजित किया जा सकता है (इसे कम्यूटेशन कहते हैं)। आमतौर पर, V चरण अपरिवर्तित रहता है, जबकि U और W चरण एक दूसरे के सापेक्ष समायोजित किए जाते हैं। यह सुनिश्चित करने के लिए कि दो कॉन्टैक्टर के कार्य करते समय मोटर के चरण अनुक्रम का विश्वसनीय रूप से आदान-प्रदान हो सके, कॉन्टैक्टर के ऊपरी पोर्ट पर वायरिंग सुसंगत होनी चाहिए और कॉन्टैक्टर के निचले पोर्ट पर चरण को समायोजित किया जाना चाहिए। दो चरणों के चरण अनुक्रम के आदान-प्रदान के कारण, यह सुनिश्चित करना आवश्यक है कि दो KM कॉइल एक ही समय में चालू न हों, अन्यथा चरण-दर-चरण शॉर्ट सर्किट की गंभीर समस्या उत्पन्न हो सकती है। इसलिए, इंटरलॉकिंग का उपयोग करना आवश्यक है।
सुरक्षा कारणों से, बटन इंटरलॉकिंग (यांत्रिक) और कॉन्टैक्टर इंटरलॉकिंग (विद्युत) के साथ एक डबल इंटरलॉकिंग फॉरवर्ड और रिवर्स कंट्रोल सर्किट का अक्सर उपयोग किया जाता है; बटन इंटरलॉकिंग का उपयोग करके, फॉरवर्ड और रिवर्स बटन को एक साथ दबाने पर भी, फेज एडजस्टमेंट के लिए उपयोग किए जाने वाले दोनों कॉन्टैक्टर एक साथ चालू नहीं हो सकते हैं, जिससे फेज-टू-फेज शॉर्ट सर्किट से यांत्रिक रूप से बचा जा सकता है।
इसके अतिरिक्त, उपयोग किए गए कॉन्टैक्टरों के इंटरलॉकिंग के कारण, जब तक कोई एक कॉन्टैक्टर चालू रहता है, उसका लंबे समय तक बंद संपर्क बंद नहीं होता। इस प्रकार, यांत्रिक और विद्युत दोहरे इंटरलॉकिंग के अनुप्रयोग में, मोटर की विद्युत आपूर्ति प्रणाली में फेज-टू-फेज शॉर्ट सर्किट नहीं हो सकता, जिससे मोटर की प्रभावी सुरक्षा होती है और फेज मॉड्यूलेशन के दौरान फेज-टू-फेज शॉर्ट सर्किट से होने वाली दुर्घटनाओं से बचा जा सकता है, जो कॉन्टैक्टर को जला सकती हैं।
पोस्ट करने का समय: 7 अगस्त 2023


